AKD Drive
First generation AKD drives support one axis per drive, while AKD2G drives support two axes per drive.
When configuring drives in the EtherCAT Devices tab, you need to designate which motion axis applies to each drive axis, which is the actual axis the drive controls.
See WorkBench 2 in the KAS-IDE for more information.
WorkBench Toolbar
The toolbar provides access to these actions:
- Enable / Disable the drive (software enable).
- Start / Stop the Service Motion.
- Mode: Position / torque / velocity
- Disable and Clear Faults: Click this button to clear the fault, then click the Enable button to enable the drive again.
- See Clearing Faults for more information.
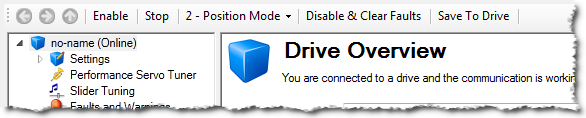
Figure 1: AKD Toolbar
-
Depending on the number of AKD drives physically present in the EtherCAT network, the KAS-IDE might slow down when getting data.
The KAS Runtime is not concerned with this limitation.
-
-
To stop all the AKD drives at the same time, click the Stop button
 in the Device Toolbar.
in the Device Toolbar.
WorkBench Status Bar
The status bar provides the following information on the drive:
- A fault indicator (No Faults / x Faults) that becomes red when any AKD gets a fault.
- Use the Log Messages Settings to get more details on the drive messages.
- The drive status: active / inactive.
- The software (SW) enable status.
- The hardware (HW) enable status.

Figure 2: AKD Status Bar
For the SW and HW enable status indicators, the color code is:






